Measurements on the LRK350-20-13 in flight
on 23.9.2001
translation by Max Zuijdendorp
Because we have the very nice and light DataLogger , which has a "direct wire"
to the SPEEDY-BL,
it was simple to make several climbing flights with the ASW24
. The "direct wire" consists of 5 signal wires which
supply the data straight from the SPEEDY-BL from the lower connecting
plug. The rpm is measured as the 3-phase field revolving frequency,
which is 7 times the propellor rpm, and therefore 7 times as
accurate.
We measured with an accuracy of 14 bit:
The DataLogger will allow airspeed measurement, but since
we only want to make energy comparisons (propulsion efficiency)
I did not mount the speed sensor that I normally use for measuring
polar graphs..
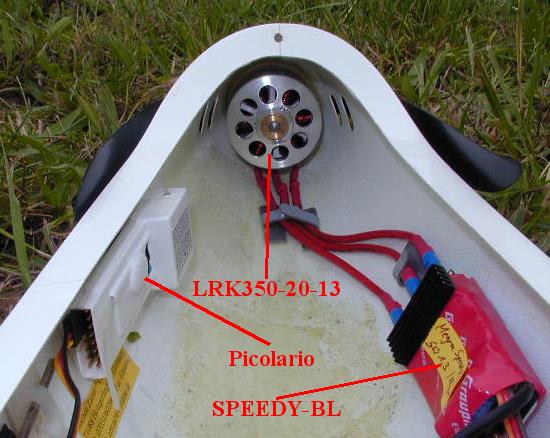
The ASW24 has a wingspan of 3,14m and weighs 3,3kg. 10 Cell
packs were used as energy source. Placing the motor LRK350-20-13
and the ESC was not a problem in the spacious fuselage. The propellor
was an Aeronaut 15x8. You can see the Picolario in the picture.
That is where we fixed the Datalogger.
We started at 16:00 in fairly windy weather in a large meadow.
After the first climb you can see a bit of thermal activity (90-120s).
At the second descent around 540s, Jochen pitched it down firmly
over the whole 70m.
An important result is the sinking speed of approx. -0,95m/s.
I will use this figure later to assess the climbing performance.
Interesting are the battery voltage and the motor current.
Since the first climb was at 5m/s we will look closer at this
climb to see if there are any unusual stretches.
Thanks to the pilot the climb was very steady, no energy from
the cells was waisted with stalls. The second climb shows an
average rate of climb of 4 m/s.
The third climb:
At the fourth climb we have investigated the partial loading
at 15A and 22A, on my special request (see current diagram).
Full throttle climb needs 35A. I will not discuss partial load
here. We concentrate on the average climb #2.
Let's take the section from 320s to 380s, 1 Minute long.
Altitude increase is:
H=h(380)-h(320)=243,5-7,5=236m
The 3,3kg heavy model has aquired a potential energy of:
Ep=m*g*H=3,3*9,81*236=7.640 Joule oder
Watt-Sekunden
In the same timespan the model "descended" wit a
sink rate of -0,95m/s and has spent potential energy:
Es=m*g*T*v_sink=3,3*9,81*60*0,95=1.845
Joule
The propulsion has transmitted in 60 seconds an amount of
energy of:
E=Ep+Es=7.640+1.845=9.485 Joule
to the airframe. The question is, how much energy has the
propulsion drawn from the battery?
For that, we only need to calculate the integral of U*I over
the 60s between 320s and 280s.
From the battery we used:
E_bat=Sum(U*I)=21.361 Joule (Volt*Amp*Sekunden)
Now we can calculate the overall efficiency:
from battery, past the ESC, motor,propellor to the model and
the height it gained:
Eta=E/E_bat=9.485/21.361=0,444=44%
I have not seen such a high effiency before, although I build
performance models and I have measured several propulsions. This
high number results from several favourable aspects:
I will not bore you with the other flights and the 2nd and
3rd battery. Altogether 12 climbs.The efficiency of the first
flight was even marginally higher. Overall you can say that the
propulsion is very efficient.
To conclude a graph of the battery voltage, not against time
but against the extracted energy (mAh). The green line shows
the concurrent motor current. The fourth flight was partial load!
Back
to the LRK main page |