who will NOT build it? |
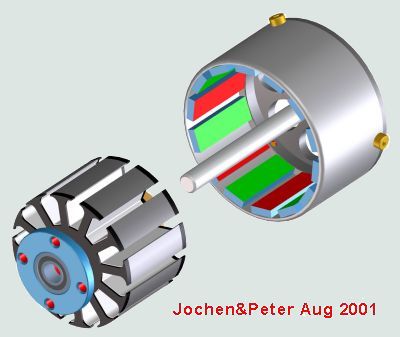
 stator
to the front. The shaft will
be very hard steel with diameter of 5 mm (0.2"). Both
ball bearings will be placed as far from each other, as possible,
much further, than in original design (much higher mechanical
stability, less vibration). The rear ball bearing is bigger (16x5x5 mm)
and front one smaller (11x5x4 mm).
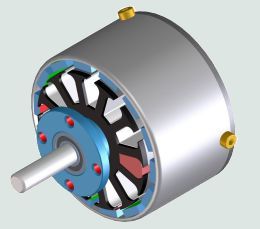
stator
to the front. The shaft will
be very hard steel with diameter of 5 mm (0.2"). Both
ball bearings will be placed as far from each other, as possible,
much further, than in original design (much higher mechanical
stability, less vibration). The rear ball bearing is bigger (16x5x5 mm)
and front one smaller (11x5x4 mm).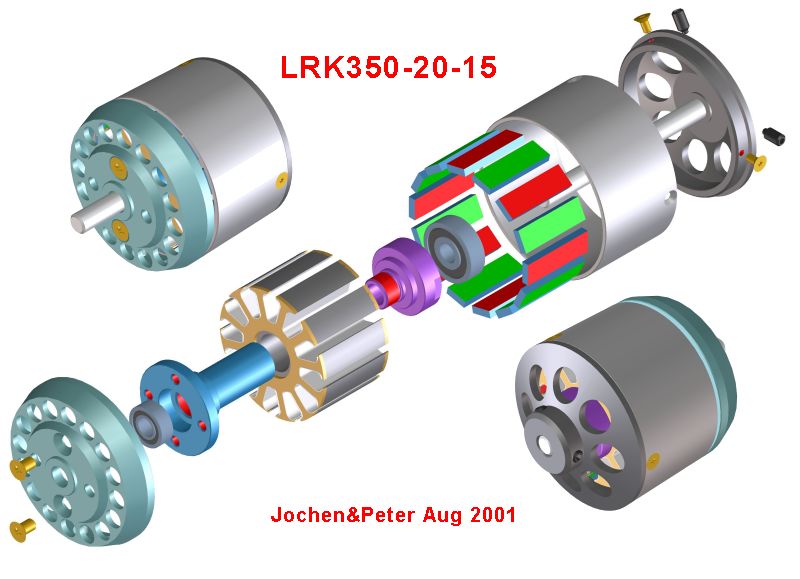



 |
The calculation for the first motor was done to achieve about 10-20% slower running motor. I wanted to run target props of about 14x8 but also wanted to try bigger props with better efficiency. The LRK motor is very strong from slow rpm up to high rpm. The maximum is very broad. I am using 2-pole inner-runner AVEOX1010/2w with 4.4:1 gear box on 14x9" prop and a very fast inner-runner from MAXON with 14:1 gear box on 18x11 (endurance flight). Therefore I was interested in comparison between these commercial good engines and this new design. The huge advantage of LRK is, that you don't need gear box. You save therefore 8-15%. |
BL controller, self made
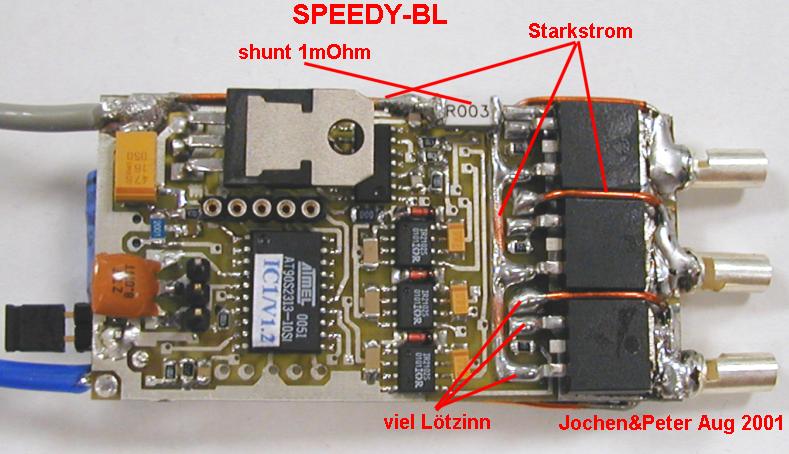
The was only one controller for this beautiful engine: SPEEDY-BL from Jo Aichinger , distributed by the shipping company Megra es a kit. Why? I wanted to test this circuitry, but also wanted to be able to change the angle of ignition. Three other commercial BL-controller were used to drive my motor.
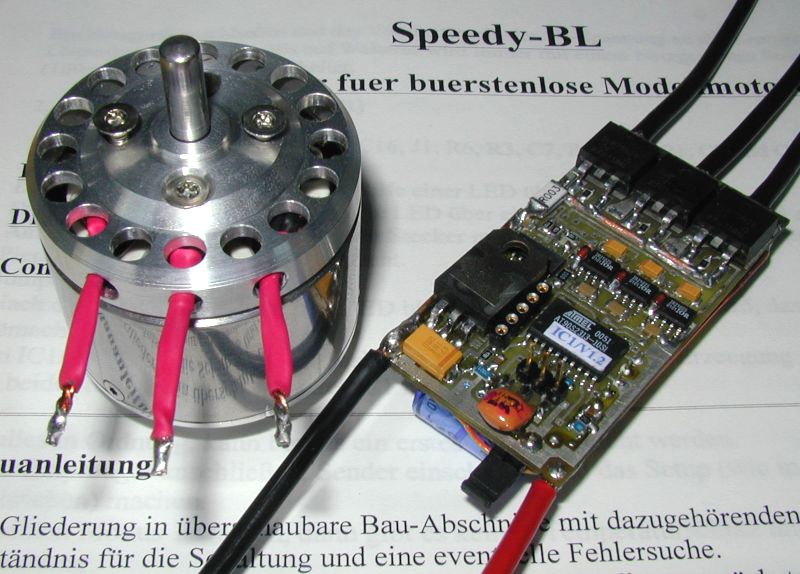
Here ready-to-go combination LRK350-20-15 and SPEEDY-BL
Torquemax
measurements
 The
nice thing about such project is, that you can measure your motor
with relative simple tools: ampermeter, voltmeter and revolution
counter.
The
nice thing about such project is, that you can measure your motor
with relative simple tools: ampermeter, voltmeter and revolution
counter.
After completing the motor I was measuring with these simple tools all the day.
Later on I'll show how to measure such engine with 14-bit self-made test equipment. The Aeronaut company supplies all props with n100w numbers, so we can calculate, how much power at given revolution this props takes.
I've measured voltage with 0.1% accuracy and current over 2.5mOhm shunt resistor (4-point-measurement). The revolution has been measured as frequency of MOSFET-Gate drive. The advantage of this method is much higher accuracy than the classic optical prop method. The normal optical revolution counter has an accuracy of 100rpm, in best case of 10rpm. It easy to measure MOSFET-Gate frequency within 1 Hz. I've measured this frequency of about 400 Hz within 0.4 Hz.
The whole measurements are to big to be posted here. For each propeller up to 8 working points were measured and the specific revolution/volt calculated.
The motor was operating very cool, even after minutes of service at 300 watts. This engine was much cooler than Ultra 1310-10 at the same torture. The whole work was done with single goal: to determine windings for two engines, one for 8 cells and one for 10 cells NiCd at 300 watts with 14x8 prop.
Example, Excel spread sheet
Here you can download all spread sheets with tables and 9 diagrams. The angle of ignition has been vary and efficiency observed. Here you can download program for prop selection.
Thrust measurement
Thrust has been measured in 3.6kg ASW24 (span 3.2m) containing LRK350-20-15 or an Ultra 1300-10. Prop was Aeronaut CAMCarbon 15x8. Battery 10 cells 2400mAh. Diagramme und Tabelle hier.
What comes next?
We are planning to build few different types of this engines. Construction is not finished yet. At the end we hope to have a good design, that can be duplicated with easy.
Who are we?
 |
Jochen was studying precision mechanics some years ago. He is working on IC testing equipment at Agilent Technologies today. 18 years ago he was designing combustion engines for rc-modeling. Today he is flying only electric gliders and normal gliders. Both semi scale. He is also working with passion in 3-D CAD systems. All work on milling-machine has been done by him. |
 |
Peter is working in the same company, but in a different division. He designs measurement equipment for the last 20 years, specially for medical, chemical and internet area. He has worked for NASA on Jupiter Orbiter "Galileo" years ago and for the Hewlett-Packard Labs in California. He likes very much to design, construct and measure. But he likes also to bike or to chat in rco . |